


ЁЏзЂЫмЩњВњЕФСїГЬжаашвЊАбзЂЫмЭъГЩЕФжЦЦЗЛђЫЎПкДгЛњЬЈФкШЁГіЃЌдкетИіЛЗНкШЁДњШЫЙЄЕФЗНАИгаЖржжЃЌСљжсЛњЦїШЫЁЂЛњаЕЪжКЭздЖЏЛЏСїЫЎЯпЖМЪЧГЃгУЕФЗНАИЃЌЕБШЛЛсИљОнЪЕМЪЧщПіжаВЛЭЌЕФВњЦЗЁЂадМлБШЕШИїЗНУцзлКЯбЁдёЁЃЯТУцЪЧABBгыКЃЬьзЂЫмЛњХфЬзЕФвЛИіШЁМўЗНАИЕФгІгУЗжЮіЃЌЯЃЭћФмИјФњвЛЕуВЮПМЁЃ

1.ЯюФПвЊЧѓ
гУABBЛњЦїШЫЪЕЯжздЖЏЛЏШЁМўЙІФмЁЃЛњЦїШЫАВзАдкЗДВйзїВрЃЌДгзЂЫмЛњЖЅВПШЁМўЁЃ
2.ЦНУцВМОж
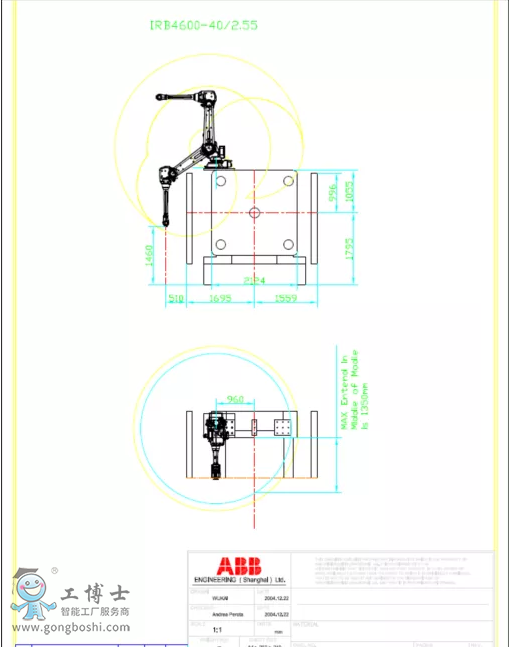
1200TwithIRB4600-40/2.55
3.ЗНАИУшЪі
3.1ЛњЦїШЫбЁаЭ
ИљОнКЃЬь1200TзЂЫмЛњГпДчбЁдёIRB4600-40/2.55ЮЊХфКЯКЃЬь1200TзЂЫмЛњШЁМўгУЛњЦїШЫЃЌИУПюЛњЦїШЫ6жсгааЇИКдиДяЕН40KgЃЌгааЇЙЄзїАыОЖЮЊ2.55УзЁЃАВзАдкКЃЬь1200TзЂЫмЛњЖЈФЃАхЖЅВПЦЋЯђЗДВйзїВрЃЌГ§ФмДяЕНзЂЫмжааФШЁМўЭтЃЌШдПЩдкФЃЭтЯТЬНжС1450ДІЗХМўЁЃ
3.2ЛњЦїШЫЗЇЯф
ИУПюЛњЦїШЫХфБИзЂЫмШЁМўзЈгУЗЇЯфЯЕЭГЃЌЦфЬиЕуЪЧРЉеЙадЧПЃЌБугкЮЌЛЄЁЃИУЗЇЯфЫљгаЦјЖЏдМўНдВЩгУFESTOЦЗХЦВПМўЁЃЗЇЯфАДзАдкЛњЦїШЫ3жсЖЅВПЃЌВЂгЩЛњЦїШЫзЈгУPMAЙмСЌНгЕНЛњЦїШЫ6жсЗЈРМДІЃЌЫљгУЦјЙмЃЌаХКХЯпНдДгPMAЙмФкВПзпЯпЃЌДгЖјБмУтЛњЦїШЫЙиНкЛюЖЏЪБЗЂЩњЙмЯпВјШЦЁЃИУПюЛњЦїШЫБъХфЗЇЯфАќКЌСЫ4ТЗДјецПеМрВтМАДЕЦјЙІФмЕФецПеЛиТЗКЭ4ТЗДј3/5жаЗтЪНЕчДХЗЇЕФЦјМаЛиТЗЁЃ
3.3ЙЄзїСїГЬ
Step1ЃКЛњЦїШЫдкзЂЫмЛњФЃЩЯД§ЛњЮЛжУЕШД§зЂЫмЛњЭъШЋПЊФЃКѓНјШыФЃФкдкЖЏФЃВрШЁМўЃЛ
Step2ЃКЛњЦїШЫЭъЗХШЁМўКѓЭЫЛиЕНФЃЭтД§ЛњЮЛжУЃЌВЂШУзЂЫмЛњКЯФЃЃЛ
Step3ЃКЛњЦїШЫвЦжСФЃЭтЗХМўЮЛжУЗХМўЃЌЭъГЩКѓдйДЮЛиЕНзЂЫмЛњФЃЩЯД§ЛњЮЛжУЃЛ
4.ММЪѕВЮЪ§
4.1ЛњЦїШЫММЪѕВЮЪ§
4.1.1БОЬхВПЗж(IRB4600-40/2.55)
ЫЕУї
аЭКХЃКIRB4600-40/2.55ЃЛ
ЪжЭѓГжжиЃК40kgЃЛ
БлеЙАыОЖЃК2550mmЃЛ
жсЪ§ЃК6ЃЛ
ЗРЛЄЕШМЖЃКIP67ЃЛ
АВзАЗНЪНЃКЕиУцАВзА/ЧуаБАВзА/ЕЙЙвАВзАЃЛ
адФмжИБъ
ЮЛжУжиИДОЋЖШЃК0.06mmЃЛ
ЕчЦјСЌНг
ЕчдДЃК3Яр400V(+10%ЃЌ-15%)ЃЌ50HzЃЛ
ЖюЖЈЙІТЪЃК1.62KW(ISOCubMAXVelocity)ЃЛ
ЮяРэВЮЪ§
БОЬхзмИпЃК1922mmЃЛ
ЕззљГпДчЃК512mm676mmЃЛ
жиСПЃК435kgЃЛ
ЛЗОГВЮЪ§
ЛЗОГЮТЖШЃК5C-45CЃЛ
ЯрЖдЪЊЖШЃК95%ЃЛ
дыЩљЕШМЖЃК<70dBЃЛ
ИКдиЭМБэ
 4.1.2IRC5ПижЦЙё
4.1.2IRC5ПижЦЙё
ПижЦгВМўЃК
ЖрДІРэЦїЯЕЭГ
PCIзмЯп
БМЬкCPU
ДѓШнСПЩСДц(256M)
20sUPSБИЗнЕчдДЃЛ
ПижЦШэМўЃК
baseWare5.0ЛњЦїШЫВйзїЯЕЭГ
ЧПДѓЕФRAPIDБрГЬгябд
PC-DOSЮФБОИёЪН
ШэМўГіГЇдЄзАЃЌВЂДцгкЙтЕњЃЛ
ЕчЦјСЌНгЃК
ЕчдДЃК3Яр400V(+10%ЃЌ-15%)ЃЌ50HzЃЛ
ЖюЖЈЙІТЪЃК6KVAЃЈIRB140ЃЌ1410ЃЌ1600ЃЌ2400ЃЌ260ЃЌ340ЃЌ4400ЃЌ6400RFЃЉЃЛ
13KVAЃЈIRB660ЃЌ66XXЃЌ7600ЃЉЃЛ
ЪфШыЪфГіЃКЪ§зжЪНжБСї24VЃЌ16Нј/16ГіЃЌЪфШыЪфГіАхЃЛ
АВШЋадЃКНєМБЭЃжЙЃЌздЖЏФЃЪНЭЃжЙЃЌВтЪдФЃЪНЭЃжЙЕШЃЛ
ЮяРэВЮЪ§ЃК
ГпДчЃК970mmЁС725mmЁС710mmЃЈЕЅЙёЃЉЃЛ1370mmЁС725mmЁС710mmЃЈЫЋЙёЃЉЃЛ
жиСПЃК150kgЃЈЕЅЙёЃЉЃЛ180kgЃЈЫЋЙёЃЉЃЛ
ЛЗОГВЮЪ§ЃК
ЛЗОГЮТЖШЃК0C-45CЃЛ
ЯрЖдЪЊЖШЃК95%ЃЛ
ЗРЛЄЕШМЖЃКIP54ЃЛ
ВйзїНчУцЃК
ПижЦУцАхЃКПижЦЙёЩЯ
БрГЬЕЅдЊЃКБуаЏЪНЪОНЬКаЃЌОпБИВйзнИЫКЭМќХЬ
ВЪЩЋДЅУўЪНЯдЪО
ОпжаЁЂгЂЮФВЫЕЅбЁЯю
4.2гыАВзАгаЙиЕФЭСНЈВЮЪ§
ГЇЗПОЛИпЃК4.8mЃЛ
ЕиЛљвЊЧѓЃК
1.ЯюФПвЊЧѓ
гУABBЛњЦїШЫЪЕЯжздЖЏЛЏШЁМўЙІФмЁЃЛњЦїШЫАВзАдкЗДВйзїВрЃЌДгзЂЫмЛњЖЅВПШЁМўЁЃ
2.ЦНУцВМОж
1200TwithIRB4600-40/2.55
3.ЗНАИУшЪі
3.1ЛњЦїШЫбЁаЭ
ИљОнКЃЬь1200TзЂЫмЛњГпДчбЁдёIRB4600-40/2.55ЮЊХфКЯКЃЬь1200TзЂЫмЛњШЁМўгУЛњЦїШЫЃЌИУПюЛњЦїШЫ6жсгааЇИКдиДяЕН40KgЃЌгааЇЙЄзїАыОЖЮЊ2.55УзЁЃАВзАдкКЃЬь1200TзЂЫмЛњЖЈФЃАхЖЅВПЦЋЯђЗДВйзїВрЃЌГ§ФмДяЕНзЂЫмжааФШЁМўЭтЃЌШдПЩдкФЃЭтЯТЬНжС1450ДІЗХМўЁЃ
3.2ЛњЦїШЫЗЇЯф
ИУПюЛњЦїШЫХфБИзЂЫмШЁМўзЈгУЗЇЯфЯЕЭГЃЌЦфЬиЕуЪЧРЉеЙадЧПЃЌБугкЮЌЛЄЁЃИУЗЇЯфЫљгаЦјЖЏдМўНдВЩгУFESTOЦЗХЦВПМўЁЃЗЇЯфАДзАдкЛњЦїШЫ3жсЖЅВПЃЌВЂгЩЛњЦїШЫзЈгУPMAЙмСЌНгЕНЛњЦїШЫ6жсЗЈРМДІЃЌЫљгУЦјЙмЃЌаХКХЯпНдДгPMAЙмФкВПзпЯпЃЌДгЖјБмУтЛњЦїШЫЙиНкЛюЖЏЪБЗЂЩњЙмЯпВјШЦЁЃИУПюЛњЦїШЫБъХфЗЇЯфАќКЌСЫ4ТЗДјецПеМрВтМАДЕЦјЙІФмЕФецПеЛиТЗКЭ4ТЗДј3/5жаЗтЪНЕчДХЗЇЕФЦјМаЛиТЗЁЃ
3.3ЙЄзїСїГЬ
Step1ЃКЛњЦїШЫдкзЂЫмЛњФЃЩЯД§ЛњЮЛжУЕШД§зЂЫмЛњЭъШЋПЊФЃКѓНјШыФЃФкдкЖЏФЃВрШЁМўЃЛ
Step2ЃКЛњЦїШЫЭъЗХШЁМўКѓЭЫЛиЕНФЃЭтД§ЛњЮЛжУЃЌВЂШУзЂЫмЛњКЯФЃЃЛ
Step3ЃКЛњЦїШЫвЦжСФЃЭтЗХМўЮЛжУЗХМўЃЌЭъГЩКѓдйДЮЛиЕНзЂЫмЛњФЃЩЯД§ЛњЮЛжУЃЛ
4.ММЪѕВЮЪ§
4.1ЛњЦїШЫММЪѕВЮЪ§
4.1.1БОЬхВПЗж(IRB4600-40/2.55)
ЫЕУї
аЭКХЃКIRB4600-40/2.55ЃЛ
ЪжЭѓГжжиЃК40kgЃЛ
БлеЙАыОЖЃК2550mmЃЛ
жсЪ§ЃК6ЃЛ
ЗРЛЄЕШМЖЃКIP67ЃЛ
АВзАЗНЪНЃКЕиУцАВзА/ЧуаБАВзА/ЕЙЙвАВзАЃЛ
адФмжИБъ
ЮЛжУжиИДОЋЖШЃК0.06mmЃЛ
ЕчЦјСЌНг
ЕчдДЃК3Яр400V(+10%ЃЌ-15%)ЃЌ50HzЃЛ
ЖюЖЈЙІТЪЃК1.62KW(ISOCubMAXVelocity)ЃЛ
ЮяРэВЮЪ§
БОЬхзмИпЃК1922mmЃЛ
ЕззљГпДчЃК512mm676mmЃЛ
жиСПЃК435kgЃЛ
ЛЗОГВЮЪ§
ЛЗОГЮТЖШЃК5C-45CЃЛ
ЯрЖдЪЊЖШЃК95%ЃЛ
дыЩљЕШМЖЃК<70dBЃЛ
ИКдиЭМБэ
ПижЦгВМўЃК
ЖрДІРэЦїЯЕЭГ
PCIзмЯп
БМЬкCPU
ДѓШнСПЩСДц(256M)
20sUPSБИЗнЕчдДЃЛ
ПижЦШэМўЃК
baseWare5.0ЛњЦїШЫВйзїЯЕЭГ
ЧПДѓЕФRAPIDБрГЬгябд
PC-DOSЮФБОИёЪН
ШэМўГіГЇдЄзАЃЌВЂДцгкЙтЕњЃЛ
ЕчЦјСЌНгЃК
ЕчдДЃК3Яр400V(+10%ЃЌ-15%)ЃЌ50HzЃЛ
ЖюЖЈЙІТЪЃК6KVAЃЈIRB140ЃЌ1410ЃЌ1600ЃЌ2400ЃЌ260ЃЌ340ЃЌ4400ЃЌ6400RFЃЉЃЛ
13KVAЃЈIRB660ЃЌ66XXЃЌ7600ЃЉЃЛ
ЪфШыЪфГіЃКЪ§зжЪНжБСї24VЃЌ16Нј/16ГіЃЌЪфШыЪфГіАхЃЛ
АВШЋадЃКНєМБЭЃжЙЃЌздЖЏФЃЪНЭЃжЙЃЌВтЪдФЃЪНЭЃжЙЕШЃЛ
ЮяРэВЮЪ§ЃК
ГпДчЃК970mmЁС725mmЁС710mmЃЈЕЅЙёЃЉЃЛ1370mmЁС725mmЁС710mmЃЈЫЋЙёЃЉЃЛ
жиСПЃК150kgЃЈЕЅЙёЃЉЃЛ180kgЃЈЫЋЙёЃЉЃЛ
ЛЗОГВЮЪ§ЃК
ЛЗОГЮТЖШЃК0C-45CЃЛ
ЯрЖдЪЊЖШЃК95%ЃЛ
ЗРЛЄЕШМЖЃКIP54ЃЛ
ВйзїНчУцЃК
ПижЦУцАхЃКПижЦЙёЩЯ
БрГЬЕЅдЊЃКБуаЏЪНЪОНЬКаЃЌОпБИВйзнИЫКЭМќХЬ
ВЪЩЋДЅУўЪНЯдЪО
ОпжаЁЂгЂЮФВЫЕЅбЁЯю
4.2гыАВзАгаЙиЕФЭСНЈВЮЪ§
ГЇЗПОЛИпЃК4.8mЃЛ
ЕиЛљвЊЧѓЃК
