


由于机器人时刻都在运动且速度非常快,这样难免会出现碰撞到设备或者操作人员。所以,在现场,必须加入紧急停止功能保护操作人员或者设备。不管是何种的工业机器人都会留有紧急停止端子供使用者接入停止按钮或者传感器。
比如:机器人有安全围栏,当机器人在运行时,人一旦进入安全围栏内,机器人必须立马停止,如图1

ABB机器人标准型控制柜安全停止接线,接入到安全输入板

机器人系统可以配备各种各样的安全保护装置,例如门互锁开关、安全光幕和安全垫等等。
*常用的是机器人单元的门互锁开关,打开此装置可暂停机器人。
控制器有一个紧急停止(ES)三个*立的保护停止:常规模式安全保护停止(GS)、自动模式安全保护停止 (AS) 和上*安全保护停止 (SS)。
ES 停止 在任何操作模式下始终有效。( 0类停止)
GS 停止 在任何操作模式下始终有效。( 1类停止)
AS 停止 仅在系统处于自动模式时有效。( 1类停止)
SS 停止 在任何操作模式下始终有效(留给PLC)。( 1类停止)
安全板上有4排端子,分别是X5、X6、X1、X2下面来看一下各种停止方式是如何接线

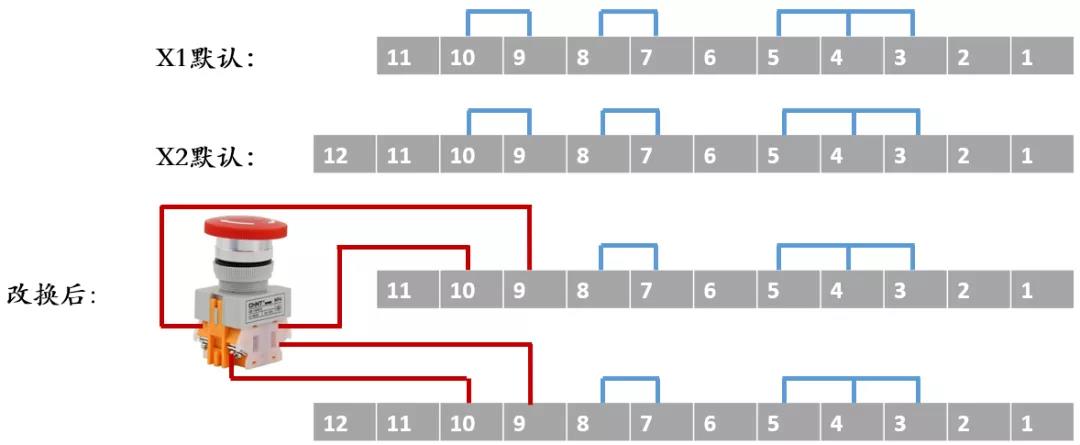
ES(Emergency Stop)停止为紧急停止,紧急停止在紧急情况下立马切断机器执行机构电源的停止。接线方法如下:
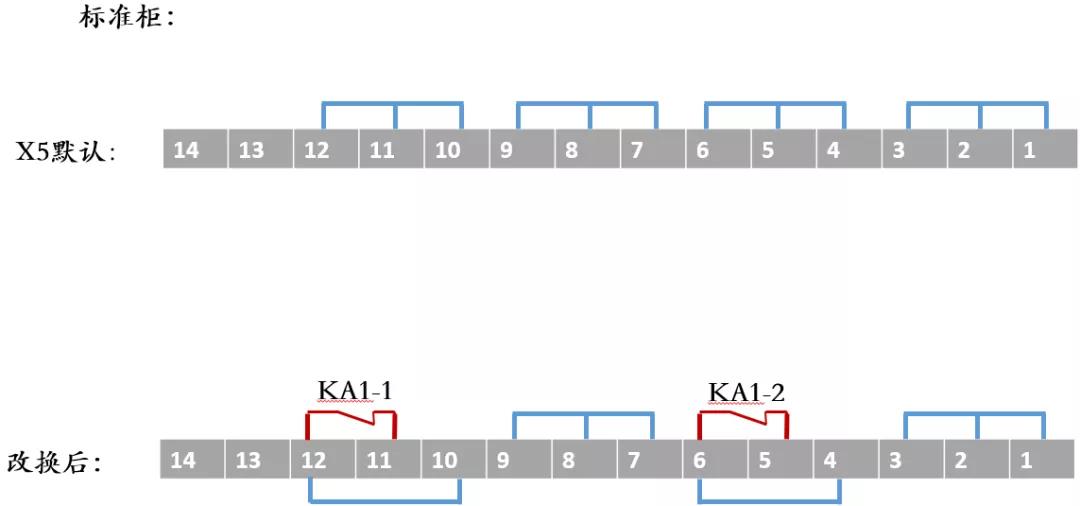
AS(Auto Stop)停止仅在自动模式下生效(例如打开安全门),若安全门被打开,触发机器人快速停止,手动模式不生效,一般用于调试。接线方法如下:
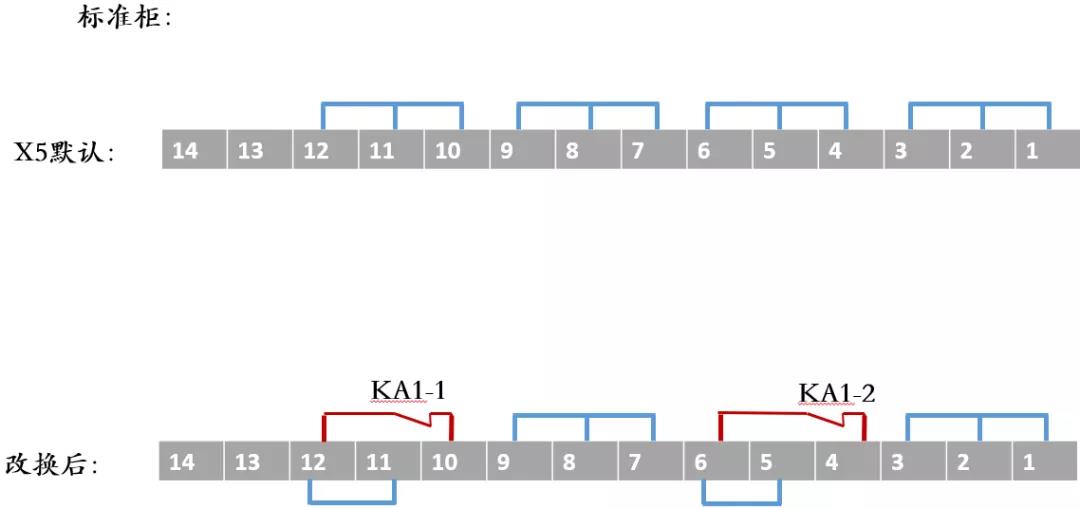
GS(General Stop)停止称为常规安全停止在自动模式和手动模式下都生效。接线方法如下:
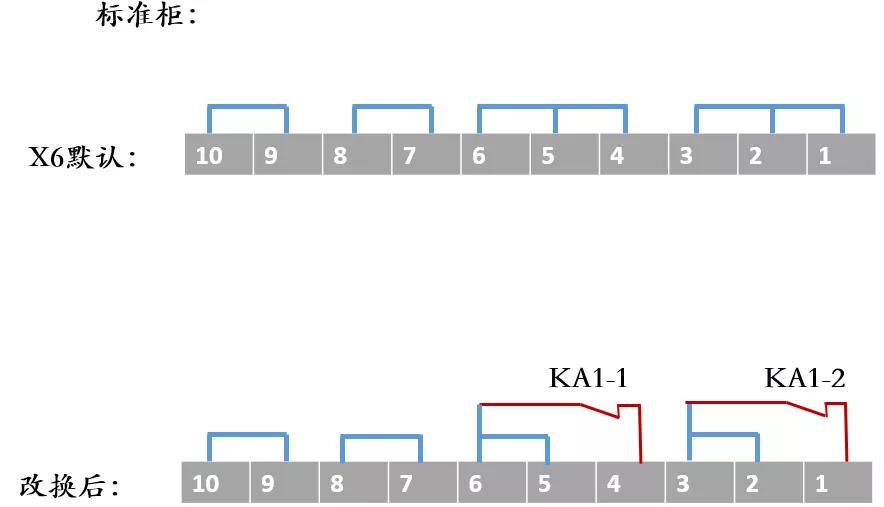
SS(Superior Stop)停止在自动模式和手动模式下都生效,属于上*停止(PLC)。接线方法如下:
结束语:ABB机器人标准型控制柜的安全停止接线根据不同的停止方式有不同的接线方法。严格按照图纸去接就不会出错!标准型的控制柜与紧凑型的控制柜接线略有不同,不能一概而论!
来源:网络
更多资讯:ABB机器人
