


一、ABB机器人单轴运动
1、ABB机器人单轴运动了解
手动操纵机器人运动一共有三种模式:单轴运动、线性运动和重定位运动。进行手动操纵前,必需把工作模式档位开至手动减速模式。下面介绍如何手动操纵机器人进行这三种运动。机器人进行线性和重定位运动时候必须先进行校准,但是进行关节运动时候可以在校准和未校准情况下移动机器人。
ABB机器人单轴运动也叫关节运动,机器人本体是由多个关节轴(自由度)组成,每个关节轴都是由伺服电机、编码器、刹车等部件组成,这里的单轴运动就是对机器人的这些轴进行单独控制移动操作。六轴机器人本体每个关节及其正负方向:

2、ABB机器人关节运动操作步骤
(1)大致步骤
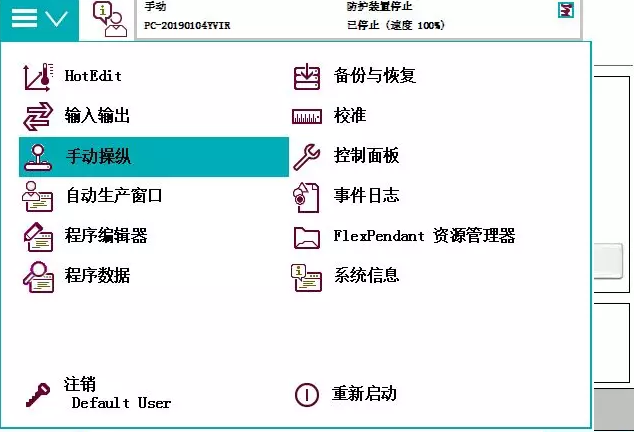
ABB菜单——>手动操作——>运动模式选择1-3轴或4-6轴——>根据摇杆方向图标操作移动机器人
(2)ABB菜单——>手动操作图片
(3)操作模式切换到1-3轴
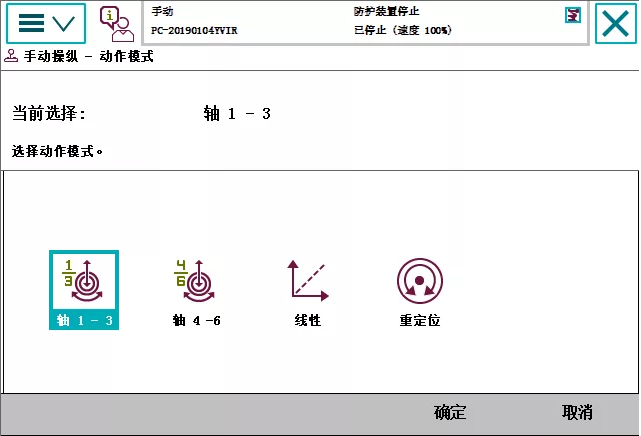
(4)操作模式切换到4-6轴

(5)ABB机器人的关节切换可以按1-3轴/4-6轴按键

(6)ABB机器人移动时候按操作杆方向进行移动,同时可以观看每个关节轴的位置数据变化:1-3轴

(7)4-6轴操纵杆方向和位置数据
(8)说明:机器人手动关节运动时候,可以用心稍微记一下机器人每个关节轴正负方向和对应摇杆方向。ABB机器人摇杆操作就一般正对的有三个方向:左右方向、前后方向、顺时针逆时针旋转摇杆。一般对应摇杆方向的1-3或4-6轴,有正方向和服方向之分,实操操作移动时候记一下每个关节机器人正方向。
二、ABB机器人线性运动
1、线性运动了解
ABB机器人线性运动是指机器人基于某个坐标系的X、Y、Z轴做移动。机器人做线性运动和重定位运动时候必须先进行机器人校准,否则不能使用这运动模式。
机器人做线性运动时候,必须选择一个参考点(质点),这个参考点所走的轨迹是线性的运动。一般每台ABB机器人都有一个默认的工具坐标系tool0,默认工具tool0的原点沿着某个坐标系的X、Y、Z所走轨迹为线性运动。也可以是机器人所安装工具TCP沿着选择的某个坐标系所走的轨迹是线性的运动。
2、ABB机器人线性运动操作步骤:
(1)大致步骤:用ABB基座标系,tool0工具
ABB菜单——>手动操作——>切换机器人运动模式为线性——>切换坐标系为基座标——>这里使用tool0工具——>按照示教操纵杆和坐标位置进行移动
(2)ABB菜单——>手动操作
(3)切换线性运动模式
(4)这里切换到线性模式也可以按下线性/重定位按键
(5)切换工具用tool0、坐标系用基座标系
(6)按照操纵杆对应的X、Y、Z正负方向操作,同时查看对应的位置数据Z、Y、Z正负数据变换
(7)操作说明:ABB机器人基座标系位于机器人底座,X、Y、Z方向确定比较方便,所以一般使用基座标系为参照,对机器人的工具TCP沿着其X、Y、Z方向做线性移动。线性移动过程中,摇杆左右、前后、顺时针逆时针旋转对应X、Y、Z的正负方向,在操作过程当中可以适当记忆和强化操作。下图默认tool0的TCP沿着ABB机器人基座标的X、Y、Z方向移动图片:
三、ABB机器人重定位运动
1、重定位理解
机器人的重定位运动是指机器人第六轴法兰盘上的工具 TCP点在空间中绕着坐标轴旋转的运动,也可以理解为机器人绕着工具 TCP点作姿态调整的运动。
重定位运动的运动方式也跟所选的坐标系有关,运动形式是基于所选择的坐标系原点围绕着 X、Y、Z轴进行顺时针旋转。
这里使用ABB机器人的基座标系为基准,利用机器人重定位,分别绕着基座标的X、Y、Z轴做旋转运动。
2、重定位操作步骤
(1)大致步骤
ABB菜单——>手动操纵——>运动模式为重定位、旋转基座标系、选定默认的tool0工具——>根据操纵图进行重定位运动
(2)ABB菜单——>手动操纵
(3)选择重定位运动模式(也可以按线性/重定位切换按键)
(4)选择基座标、工具用默认tool0
(5)根据操纵杆方向操作机器人,同时观察位置数据中TCP基本不变,而q1、q2、q3、q4变化,即机器人姿态变化,绕着基座标轴做旋转运动。
原来姿态图片:

重定位之后数据图片:

